














 4 / 8
4 / 8

3
4
5 6 7 8
STANDORT
0111
2 1
Sommerakademie in Greifenburg vergibt CNC–Stipendien
Thema: [ MECHATRONIK TIROL ]
TECHNIK
Die CNC-ACADEMY Greifenburg vergibt kostenlose Stipendien für die Sommerakademie 2011.
Im Rahmen der 4-wöchigen Ausbildung haben erstmals auch Tiroler HTL-Schüler und Studenten aus
technischen Fachrichtungen die Möglichkeit, ein umfassendes CNC-Zertifikat erwerben. Bewerbungen
an:
office@alphatec.at- CNC-ACADEMY GmbH, Mag. Andreas Otmischi, 9761 Greifenburg, Gries 1a.
Telefonische Informationen direkt unter: 0664 – 8408084.
Mehr Top-Betriebe aus dem Cluster
Mechatronik Tirol finden Sie auf
www.standort-tirol.at/mitgliederMehr Info
[
]
V
ollautomatische Industrieroboter sind in
vielen Fertigungsbetrieben längst Stan-
dard geworden. Laufend wird versucht,
die Leistung der Roboter zu verbessern und zu
optimieren, besonders was die Geschwindigkeit
der Maschinen und ihre Einsatzfähigkeit betrifft.
Auch in Tirol. Und zwar im Projekt „KineCon-
trol“, das im Rahmen des Förderprogramms
Translational Research vom Land im Wege der
Standortagentur Tirol gefördert wird. „Kine-
Control“ ist eine universitätsübergreifende Ko-
operation der UMIT Hall mit der Universität
Innsbruck und beschäftigt sich mit neuen Rege-
lungsverfahren auf der Basis einer innovativen
Lösung des Problems der inversen Kinematik.
Michael Hofbaur, Institutsvorstand am Institut
für Automatisierungs- und Regelungstechnik
der UMIT, zum Grundproblem: „Industriero-
boter verfügen im Regelfall über sechs Gelenke,
deren koordinierte Bewegung den gewünschten
Arbeitsablauf realisiert. Die Programmierung
erfolgt überwiegend nach einem Teach-In-Ver-
fahren. Das heißt, jede Bewegung wird von Hand
einzeln abgefahren und dann gespeichert. Ände-
rungen an derartigen Programmierungen sind
sehr arbeitsaufwändig und damit teuer.“
Und hier setzt „KineControl“ an, denn die For-
schungsteams der beiden Universitäten sind ge-
rade dabei, die Programmierung von Industrie-
bzw. Fließbandrobotern schneller und flexibler
einsetzbar zu machen. Basis dieses neuartigen
Ansatzes ist ein an der Innsbrucker Universi-
tät (Forschungsteam um Manfred Husty vom
Institut für Grundlagen der Bauingenieurwis-
senschaften) entwickelter Algorithmus. Dieser
innovative Algorithmus ermöglicht die mathe-
matische Ermittlung aller möglichen Bewegun-
gen des Roboterarms für einen Arbeitsablauf,
wodurch eine schnelle Umprogrammierung z.B.
bei Änderung des Arbeitsablaufs möglich ist. Die
Kenntnis aller möglichen Bewegungen für eine
spezifische Handhabungsaufgabe hat auch den
Vorteil, dass eine Optimierung in Punkto Präzisi-
on, Energieeffizienz und Arbeitsgeschwindigkeit
möglich wird.
Der Algorithmus ermöglicht es aber auch weit
über die bisher in der Industrie verwendeten Ro-
botergeometrien hinauszugehen, weil er keine
SpezialisierungderBewegungsachsenanordnung
voraussetzt. Know-how für die rechentechnisch
effiziente Berechnung der Roboterregelung,
insbesondere deren leistungsorientierte Paralle-
lisierung für Mehrkernprozessoren, wird durch
die Arbeitsgruppe um Thomas Fahringer am Ins-
titut für Informatik der Universität Innsbruck ins
Projekt eingebracht. Im Unterschied zu bereits
existierenden Regelungsverfahren besitzt der
„KineControl“ Ansatz den Vorteil, dass er durch
seine allgemein gehaltene Formulierung auf die
unterschiedlichsten Robotertypen anwendbar
ist. Somit wird auch die Regelung modularer Ro-
botersysteme, die entsprechend einer aktuellen
Aufgabenstellung aufgebaut sind, erleichtert.
Die Anschaffung und der Betrieb eines Roboters
wird damit für KMUs interessanter, da sich sein
Einsatz auch bei Kleinserienfertigung rechnen
könnte. „KineControl“ ist somit ein Projekt, in
dem versucht wird, universitäre Grundlagenfor-
schung für die Wirtschaft anwendbar zu machen.
Da die Robotik ein sehr komplexes Gebiet ist, in
dem viele Grundlagenfächer wie Mathematik,
Kinematik, Informatik, Maschinenbau, Elektro-
technik und Regelungstechnik eine Rolle spie-
len, ist die in diesem Projekt gelebte interdiszi-
plinäre Zusammenarbeit eine für den Erfolg
notwendige Voraussetzung. Das Projekt macht
gute Fortschritte: Neben theoretischen Arbeiten
zu diesem Thema wird an der UMIT ein Testla-
bor mit modularen Robotern aufgebaut.
Am 23. und 24. Mai kann man sich über „Ki-
neControl“ ein Bild machen, denn da lädt die
UMIT in Hall alle Interessierten zum Austrian
Robotics-Workshop ein (Infos dazu finden sich
unter
http://www.roboticsworkshop.at/).
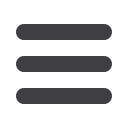
Automatisierungstechnik. Die UMIT in Hall und die Universität Innsbruck läuten mit dem gemeinsamen
Forschungsprojekt „KineControl“ möglicherweise einen Paradigmenwechsel in der Roboterprogrammierung ein.
Mehr (Bewegungs)Freiheit für
Industrieroboter der Zukunft
D
ie Plansee Holding AG mit Sitz im
Außerferner Breitenwang erwirt-
schaftet mit ihren gut 6000 Mitarbeitern
einen Jahresumsatz von über 850
Millionen Euro (2009/10). Kernkom-
petenz des Tiroler Vorzeige-Unterneh-
mens ist die Pulvermetallurgie, in der
Plansee-Gruppe dreht sich alles um die
Herstellung und Verarbeitung der Metalle
Molybdän und Wolfram. Nun kann
bald einmal ein Unternehmen Metall
schmelzen, die Bilder von rotglühendem,
flüssigem Stahl kennt jeder. Doch Eisen
schmilzt bereits bei 1536 Grad Celsius,
im Gegensatz dazu liegt der Schmelz-
punkt von Molybdän bei 2620 Grad C,
Wolfram sogar erst bei 3420 Grad C.
Und hier beginnt die Geschichte der
Pulvermetallurgie und in aufwändigen
Prozessen wird das Metallpulver dann
unter hohem Druck in genau jene Form
gepresst, die der Kunde haben möchte.
Die Anwendungsmöglichkeiten dieser
Hochtechnologiewerkstoffe sind sehr
vielfältig und die Plansee-Gruppe beliefert
eine große Zahl an Branchen, etwa die
Medizintechnik, die Elektronik- und Halb-
leiterindustrie oder den Automobilbau.
Infos unter
www.plansee.comPlansee bringt
Metall in Form
PLANSEE-GRUPPE
PhysTech optimiert Oberflächenfunktionalität
[ konkret GESEHEN ]
D
ie Außerferner PhysTech Coating
Technology GmbH beschäftigt
sich mit der Entwicklung, Optimierung
und Charakterisierung von Beschich-
tungsprozessen. Vor allem bei der
Entwicklung von Dünnschichtsystemen
ist PhysTech ganz vorne mit dabei,
aktuell werden unter anderem in einer
Kooperation mit der PLANSEE-Gruppe
neuartige Brennstoffzellen mit einer
Spezialbeschichtung aus dem Hause
PhysTech entwickelt, die bald in die
Phase industrieller Vorserienproduktion
eintritt. Als Dünnschichttechnologie
bezeichnet man die Fähigkeit, eine
Materialschicht, die tausendmal dünner
ist als ein menschliches Haar, auf ein
Trägerprodukt aufzubringen, um dessen
Eigenschaften zu optimieren. Georg
Strauss (im Bild), der gemeinsam mit
Stefan Schlichtherle als Geschäftsführer
der PhysTech in Pflach agiert, zu den
Anwendungsmöglichkeiten der Dünn-
schichttechnologie: „Eigentlich kommt
überhaupt kaum mehr ein Produkt auf
den Markt, dessen Oberfläche nicht be-
handelt worden ist. Dementsprechend
vielfältig sind auch die Einsatzmöglichkei-
ten für diese Technologie. Das reicht von
der Oberflächenbehandlung von Werk-
zeugen, über optische Geräte bis hin
zu medizinischen Produkten, wie etwa
Implantaten.“ Durch das Aufbringen von
Materialen im ultrafeinen Nano- bzw.
Mikrometerbereich verbessert sich etwa
die Kratzfestigkeit von Brillengläsern
und Handy-Displays, mit Dünnschicht-
technologie behandelte medizinische
Implantate erleichtern das Einwachsen
in den Körper und auch in der Lebens-
mittelindustrie findet die Dünnschicht-
technologie ihre Anwendungen, denn
damit können Verpackungen zugleich
wasserdicht und luftdurchlässig sein.
Einen großen Stellenwert nimmt bei
PhysTech auch die Forschung ein, denn
im Prinzip kann durch Beschichtung die
Oberflächenfunktionalität jedes Materials
optimiert werden, wodurch die Einsatz-
möglichkeiten dieser Technik nahezu
unbegrenzt sind. Nähere Informationen:
www.phystech-coating.comFoto: Plansee
Ein kleines Unternehmen liefert Messdaten, wo kein
anderes Unternehmen mehr Messdaten liefern kann.
S
chon als HTL-Schüler hat der
Haller Andreas Schinner für
Aufsehen gesorgt, er entwi-
ckelte den „Flying Avalanche Dog“.
Das mit Elektronik vollgestopfte
Gerät dient zur Ortung von Ver-
schütteten unter einer Lawine und
soll überall da in Einsatz kommen,
wo viele Variantenfahrer unterwegs
sind, man aber nicht bei jedem Ein-
satz sofort einen großen Helikopter
einsetzen will oder kann.
Längst ist aus dem Schüler ein
Ingenieur geworden, Andreas
Schinner hat vor zwei Jahren „AS-
Electronicdesign“ gegründet. Mit
seinem Unternehmen ist Schinner
im Bereich der Telekommunikati-
onstechnik tätig, weiters beschäf-
tigt er sich auch mit EMV, der
Elektro-Magnetischen-Verträglich-
keit und mit allem, was mit Mess-
technik zu tun hat. Sein aktueller
Auftrag zeigt aber, dass es Schinner
nicht um Standard-Messverfahren
in einer Standard-Umgebung geht.
Schinner ist an einem Projekt der
Universität Innsbruck (Institut für
Geographie) beteiligt, welches sich
mit der Vermessung des Gletschers
am Kilimanjaro beschäftigt. Es ist
eine
Datenübertragungsstrecke
vom Gletscherende bis zum Gip-
fel in fast 6000 Metern Seehöhe
errichtet worden, unter Extrembe-
dingungen. „Wir arbeiten in einer
Wildnis und in einer Höhe, in der
keines der üblichen Messverfah-
ren mehr Daten liefern kann“, sagt
Schinner. Mehr Informationen
dazu finden Sie im Internet unter:
www.electronicdesign.at]
Michael Hofbaur (UMIT) leitet das von der Standorta-
gentur Tirol geförderte Translational Research-Projekt
KineControl zur Optimierung von Industrierobotern.
Foto: Friedle
Foto: Friedle, Visualisierung Koplenig
Tiroler Technik auf
Afrikas höchstem Berg